Global Average Pooling
Overview
This tutorial would show a basic explanation on how YOLO works using Tensorflow. The code for this tutorial is designed to run on Python and Tensorflow. It can be found in it’s entirety at this Github repo1.
Global Average Pooling (GAP)
Conventional neural networks perform convolution in the lower layers of the network. For classification, the feature maps of the last convolutional layer are vectorized and fed into fully connected layers followed by a softmax logistic regression layer. This structure bridges the convolutional structure with traditional neural network classifiers. It treats the convolutional layers as feature extractors, and the resulting feature is classified in a traditional way. However, the fully connected layers are prone to overfitting, thus hampering the generalization ability of the overall network. Dropout is proposed by Hinton et al. [5] as a regularizer which randomly sets half of the activations to the fully connected layers to zero during training. It has improved the generalization ability and largely prevents overfitting 4. Global average pooling replaces the traditional fully connected layers in CNN. The idea is to generate one feature map for each corresponding category of the classification task in the last mlpconv layer. Instead of adding fully connected layers on top of the feature maps, we take the average of each feature map, and the resulting vector is fed directly into the softmax layer.
Advantage
One advantage of global average pooling over the fully connected layers is that it is more native to the convolution structure by enforcing correspondences between feature maps and categories. Thus the feature maps can be easily interpreted as categories confidence maps. Another advantage is that there is no parameter to optimize in the global average pooling thus overfitting is avoided at this layer. Futhermore, global average pooling sums out the spatial information, thus it is more robust to spatial translations of the input. We can see global average pooling as a structural regularizer that explicitly enforces feature maps to be confidence maps of concepts (categories). This is made possible by the mlpconv layers, as they makes better approximation to the confidence maps than GLMs.
How it works
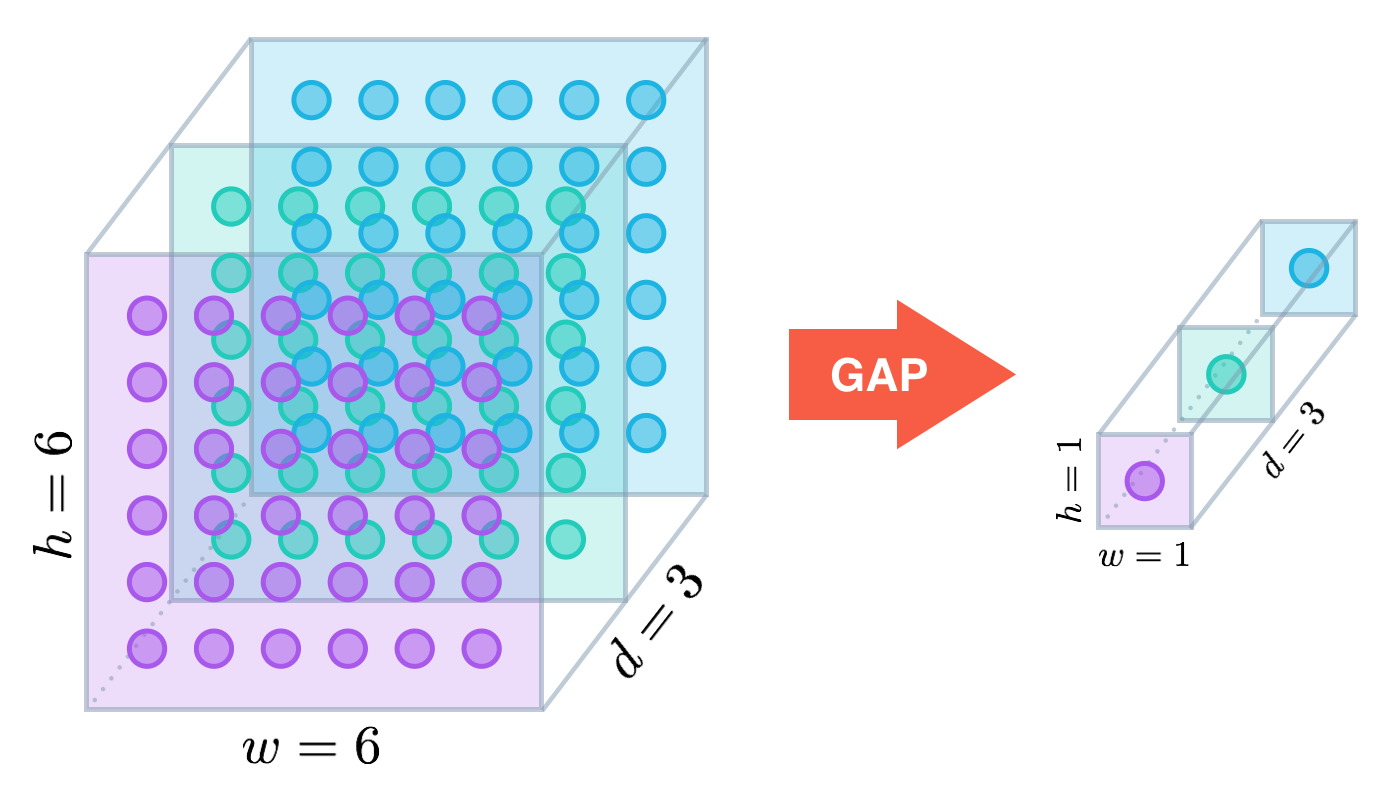
Similar to max pooling layers, GAP layers are used to reduce the spatial dimensions of a three-dimensional tensor. However, GAP layers perform a more extreme type of dimensionality reduction, where a tensor with dimensions h×w×d is reduced in size to have dimensions 1×1×d. GAP layers reduce each h×w feature map to a single number by simply taking the average of all hw values.
Applications
The ResNet-50 model takes a less extreme approach; instead of getting rid of dense layers altogether, the GAP layer is followed by one densely connected layer with a softmax activation function that yields the predicted object classes.
In mid-2016, researchers at MIT demonstrated that CNNs with GAP layers (a.k.a. GAP-CNNs) that have been trained for a classification task can also be used for object localization. That is, a GAP-CNN not only tells us what object is contained in the image - it also tells us where the object is in the image, and through no additional work on our part! The localization is expressed as a heat map (referred to as a class activation map), where the color-coding scheme identifies regions that are relatively important for the GAP-CNN to perform the object identification task.
Reference
Notes are based on: Network In Network paper [0] Learning Deep Features for Discriminative Localization[1] blog reference [2] Source Code: ResNetCAM-keras [[7]]
neural networks. In Advances in Neural Information Processing Systems 25, pages 1106–1114, 2012. [5]:Geoffrey E Hinton, Nitish Srivastava, Alex Krizhevsky, Ilya Sutskever, and Ruslan R Salakhutdinov. Improving neural networks by preventing co-adaptation of feature detectors. arXiv preprint arXiv:1207.0580, 2012. [7]:https://github.com/alexisbcook/ResNetCAM-keras
